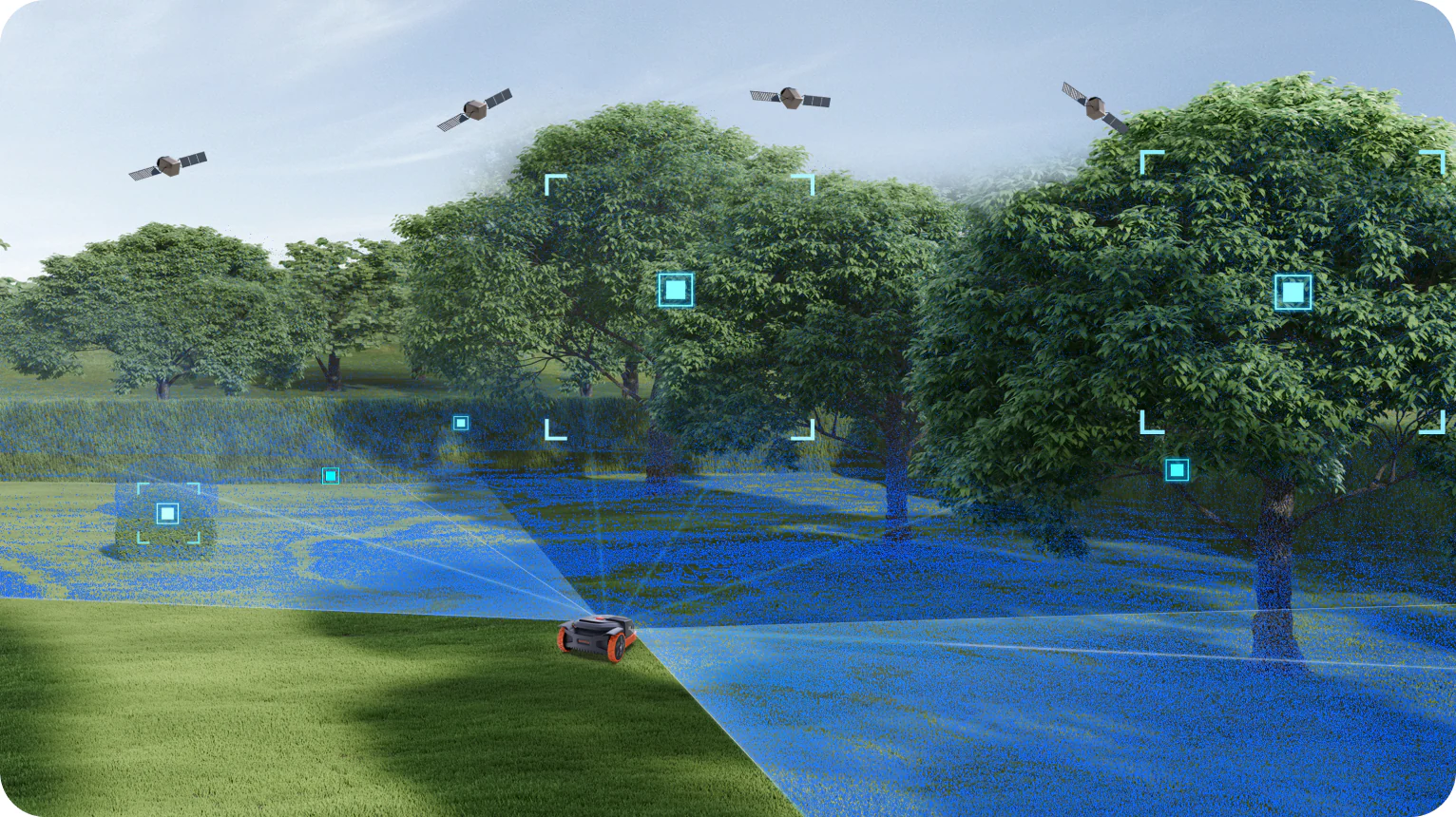
EFLS (Exact Fusion Location System) е система за позициониране, която използва сензорна интеграция (sensor fusion), за да определи точно местоположението на роботизираната косачка.
Технологията комбинира информация от няколко източника:
- RTK сателитна навигация,
- камери за визуално картографиране,
- жироскопи и акселерометри и
- одометри и други сензори.
Чрез комбинирането на тези данни системата може да определя позицията на косачката с изключително висока точност, дори в сложни условия.
Това позволява на косачките роботи да работят в рамките на виртуални граници, без да е необходимо инсталирането на физически ограничителен кабел.